Open positions
List of open positions for experienced researchers (postdocs) and projects and interships for students.

We are currently running several research projects aimed at the (broader) goal to contribute to the development of cooperative, connected and automated mobility, mainly focused on public transport such as trams, trains, city buses. We are looking for a postdoctoral researcher to join us on this journey.
Deadline for applications is August 31, 2023. Starting the position is expected anytime during the fall of 2023, but no later than early 2024.
Základní principem hnaného pohybu vozidla na kolech je prokluz. Tento prokluz však lze v průběžně (v reálném čase) řídit a optimalizovat různá kritéria.
Volněji řečeno: jestli chcete realizovat drag racing, ale s tramvajemi, tento projekt je pro vás.
")
Cílem práce bude použití základních i pokročilejších metod automatického řízení pro experimentální plotr. Ten jsme si na katedře navrhli i postavili sami, abychom na něm demonstrovali užitečnosti takových metod, které dokážou vzít v úvahu i opakující se charakter úloh. Takové úlohy lze najít na mnoha místech v průmyslu, zejména ve výrobní automatizaci – robotické manipulátory typu pick&place neustále opakují ten stejný úkol. Byla by potom škoda nevyužít znalosti o tomto repetitivním charakteru úlohy.
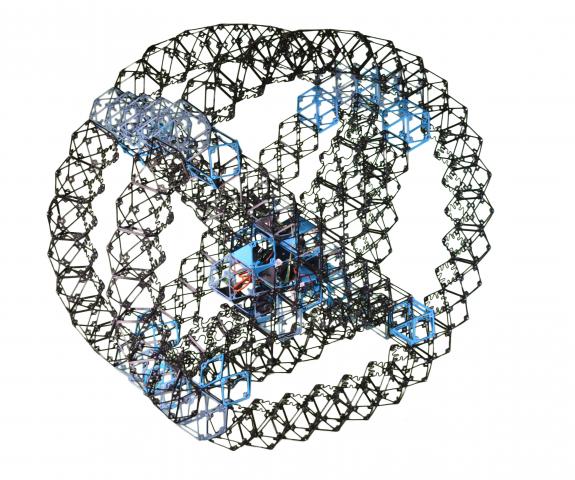
Cílem je vývoj a testování metod pro řízení struktur z digitálních materiálů. Digitální materiál je složen z diskrétních stavebních prvků, které dovolují snadno vyrábět systémy na míru, rekonfigurovat je, recyklovat atd. Výsledné systémy z digitálního materiálu jsou charakteristické mřížkovou strukturou, která je silně dynamicky provázaná a přináší tedy výzvu z hlediska řízení. Pomocí aktivních prvků lze dát výsledný mechanismus do pohybu a jinak ovlivňovat jeho dynamické chování – například potlačit nechtěné oscilace.
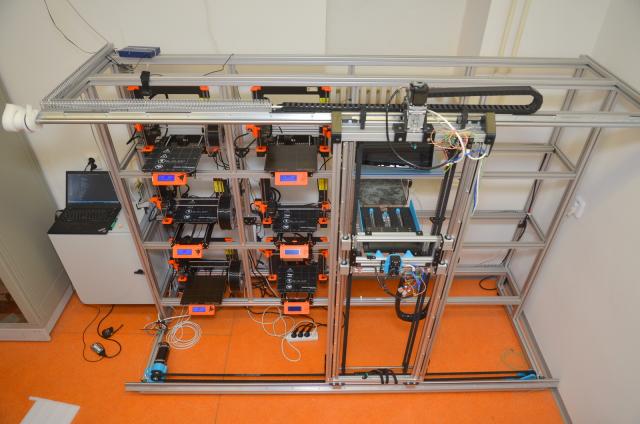
Cílem práce je navrhnout a zrealizovat manipulátor pro automatizaci provozu několika 3D tiskáren. Manipulátor by měl být schopen vyjmout hotový výtisk a uložit ho do skladovacího prostoru, aby mohla výroba probíhat nějakou dobu bez obsluhy. Možným rozšířením práce je i kontrola správného průběhu tisku případně automatizace kontroly kvality.

Cílem práce je rozšířit systém pro manipulaci pomocí magnetického pole, který využívá pole cívek k manipulaci s kovovými kuličkami. Rozšíření by mělo umožnit, aby systém mohl manipulovat se složitějšími geometrickými objekty a řídit nejen jejich polohu, ale také orientaci a tím by je mohl například automatický skládat do zadané sestavy.

Cílem práce je navrhnout systém pro řízení proudění kapaliny pomocí magnetohydrodynamiky. Kapalina může být uvedena do pohybu díky interakci elektrického proudu v kapalině a externího magnetického pole. Přes změnu proudu a magnetického pole je možné ovlivňovat proudění kapaliny. Obsahem této práce by mělo být najít matematický model vhodný pro návrh řízení, dále navrhnout strategii řízení pro dosažení požadovaného proudění, dokončit experimentální systém a s ním verifikovat matematický model a navržené řídicí algoritmy.

V tomto studentském projektu budete mít možnost uplatnit základní i pokročilé metody pro řízení reálného experimentální zařízení, které jsme si sami vyvinuli a postavili na katedře. Jedná se o sérii 20 kyvadel té stejné hřídeli. Kyvadla jsou mezi sebou propojena torzními pružinami a jejich úhlové vychýlení je měřeno enkodéry. Ke dvěma krajním kyvadlům jsou připojeny motory. Ty lze využít k řízení, a nebo případně jeden může sloužit coby generátor rušení (angl. disturbance) a druhý coby regulátor ke kompenzaci vlivu rušení.

Navrhovaný studentský projekt je motivován právě se rozbíhajícím společným projektem/grantem zadávajícího učitele a průmyslového partnera (firma Herman Systems z Brna), jehož cílem je vývoj levných avšak přesných a spolehlivých systémů pro odhadování a predikci pohybových stavů vozidel veřejné dopravy, zejména tramvají a městských autobusů. Motivací pro přesnost jsou i úlohy přesného řízení dobrzďování na zastávce či i prevence srážek.
The goal of the project is to implement a particular algorithm for solving a quadratic program (QP) that is to be used within model predictive control (MPC) applications. The algorithm is described in the paper
Julia je mladý programovací jazyk, který je od samého začátku vyvíjen se zaměřením na vědecko-technické výpočty. Jeho obliba v posledních letech roste zejména v komunitě specialistů na numerickou optimalizaci a simulaci dynamických systémů. Jim Julia nabízí pohodlí vysokoúrovňového programovacího jazyka za současné mimořádné rychlosti výpočtů (původní autoři z MIT Julii propagují sloganem "walks like Python, runs like C").

Cílem je nalézt a vyzkoušet moderní systém, který by v reálném čase umožňoval sběr dat ze senzorů a regulačních smyček na průmyslové výrobní lince, jejich archivaci a zejména pak možnost jejich zpracování, zobrazování a prezentaci lidem ve výrobním podniku. To zahrnuje například různé grafy, statistiky, histogramy a jiné reporty, které ukazují, jak daná řídicí smyčka funguje a reguluje apod.
The power grid, as a whole, is composed of heterogeneous power generators and loads. In steady state, the frequency and voltage of the grid are constant, with all the power produced being consumed. If a mismatch between the produced and consumed power occurs, the system deviates from the synchronized steady state. During such transients, a control is required to maintain the network equilibrium state within a tight margin. The main goal here is transient stability. The transient stability characteristics can be improved by applying distributed communication and cooperative control.
For low-Earth orbiting satellite formations effects of other bodies can be disregarded; individual trajectories are Keplerian ellipses if no controls are applied. When the controls are acting the orbits change according to Lagrange Planetary Equations. Formulate the consensus problem appropriate for a chosen satellite formation and show cooperative stability. This would allow completely autonomous station keeping, excluding the need for ground stations.
Investigate satellite trajectories in the system of tidally locked ''eyeball'' planets. Use the Hill's model to study the shape and stability of trajectories. Look into long-term effects of perturbations; is long-term orbit around either of the bodies stable? Find, if possible, compensating controls to stabilize an unstable orbit.
We receive numerous inquiries from undergraduate students if there is any research project solved by our group in which they can be involved. The typical motivation is the final-year undergraduate project/thesis but oftentimes even second- or third-year students are expressing their interest.